Inheritance diagram for EcGuiPdo:
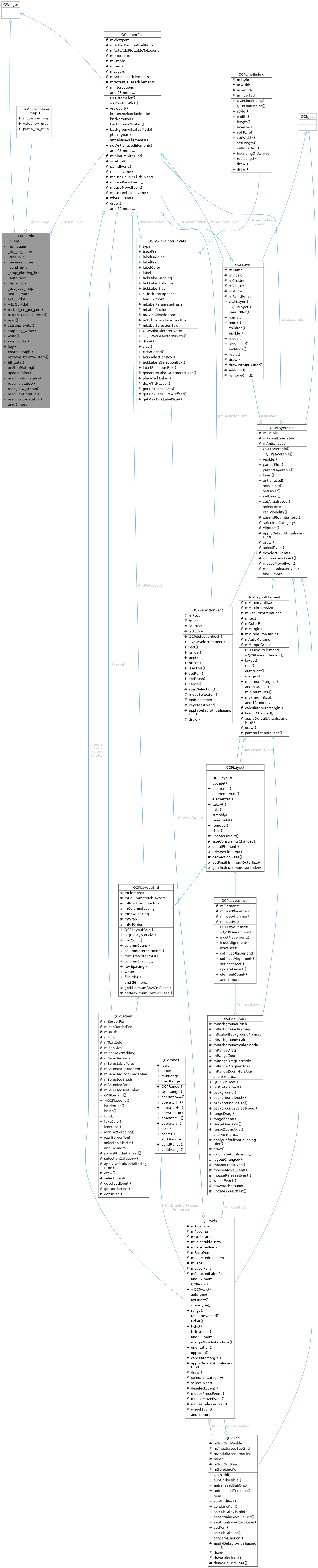
Collaboration diagram for EcGuiPdo:
Public Types | |
| typedef std::shared_ptr< EcGuiPdo > | Ptr |
Private Member Functions | |
| void | create_graph (const int &esc_id, const int &index, const std::string &esc_pdo_name) |
| QTreeWidgetItem * | retrieve_treewid_item (const int &esc_id, const std::string &esc_type, const std::vector< std::string > &pdo_fields, const std::string direction) |
| void | fill_data (const int &esc_id, QTreeWidgetItem *topLevel, const std::vector< std::string > &pdo_fields, const std::vector< float > &pdo) |
| void | onStopPlotting () |
| void | update_plot () |
| void | read_motor_status () |
| void | read_ft_status () |
| void | read_pow_status () |
| void | read_imu_status () |
| void | read_valve_status () |
| void | read_pump_status () |
| bool | check_write_device (std::map< int, SliderWidget * > slider_map) |
| void | init_write_pdo () |
| void | write_motor_pdo () |
| void | write_valve_pdo () |
| void | write_pump_pdo () |
Private Attributes | |
| EcIface::Ptr | _client |
| EcLogger::Ptr | _ec_logger |
| EcGuiSlider::Ptr | _ec_gui_slider |
| EcGuiSlider::slider_map_t | _slider_map |
| QTreeWidget * | _tree_wid |
| QElapsedTimer * | _receive_timer |
| QElapsedTimer * | _send_timer |
| QCustomPlot * | _custom_plot |
| QPushButton * | _stop_plotting_btn |
| QCheckBox * | _auto_scroll |
| QLabel * | _time_pdo |
| std::map< int, QTreeWidgetItem * > | _esc_pdo_map |
| std::map< int, std::vector< QCPGraph * > > | _graph_pdo_map |
| std::map< int, std::vector< float > > | _pdo_v |
| std::map< int, std::vector< QVector< double > > > | _buffer_pdo_map |
| QVector< double > | _buffer_time |
| bool | _update_plot |
| bool | _first_update |
| qint64 | _ms_receive_time |
| qint64 | _ms_send_time |
| double | _s_receive_time |
| double | _s_send_time |
| float | _currentHue = 0.0 |
| uint16_t | _counter_buffer |
| uint16_t | _buffer_size |
| MotorStatusMap | _motor_status_map |
| MotorReferenceMap | _motor_reference_map |
| MotorReferenceMap | _motor_ref_map |
| FtStatusMap | _ft_status_map |
| PwrStatusMap | _pow_status_map |
| ImuStatusMap | _imu_status_map |
| ValveStatusMap | _valve_status_map |
| ValveReferenceMap | _valve_reference_map |
| ValveReferenceMap | _valve_ref_map |
| PumpStatusMap | _pump_status_map |
| PumpReferenceMap | _pump_reference_map |
| PumpReferenceMap | _pump_ref_map |
| QLCDNumber * | _battery_level |
| int | _time_ms |
| bool | _motors_selected |
| bool | _valves_selected |
| bool | _pumps_selected |
The documentation for this class was generated from the following files:
- /home/runner/work/ecat-client-advr/ecat-client-advr/src/gui/ec_gui/src/pdo/ec_gui_pdo.h
- /home/runner/work/ecat-client-advr/ecat-client-advr/src/gui/ec_gui/src/pdo/ec_gui_pdo.cpp